Re: [PATCH v2] Staging: iio: adis16209: Move adis16209 driver out of staging
From: Shreeya Patel
Date: Thu Mar 15 2018 - 15:02:13 EST
On Sat, 2018-03-10 at 15:57 +0000, Jonathan Cameron wrote:
Hi Jonathan,
> On Sat, 10 Mar 2018 15:50:23 +0530
> Shreeya Patel <shreeya.patel23498@xxxxxxxxx> wrote:
>
> >
> > Move the adis16209 driver out of staging directory and merge to the
> > mainline IIO subsystem.
> >
> > Signed-off-by: Shreeya Patel <shreeya.patel23498@xxxxxxxxx>
> As this has a clear dependency on the previous patch, please put them
> in the same series for the next version.ÂÂThat way I won't miss one!
>
> This also doesn't actually seem to have all the patches in place.
> The sign extend one is definitely missing for some reason.
>
> One question on the ABI choice of X for the rotation axis.
> I think the logical choice is actually Z but would like to know what
> you and others think.
>
> All existing users of IIO_ROT (outside staging) have been
> magnetometer
> where we don't have an axis, but rather a magnetic reference frame or
> a quaternion output which includes all the axes.
>
> Jonathan
>
> >
> > ---
> >
> > Changes in v2
> > Â -Re-send the patch after having some cleanups in the
> > file included in this patch.
> >
> > Âdrivers/iio/accel/KconfigÂÂÂÂÂÂÂÂÂÂÂÂÂ|ÂÂ12 ++
> > Âdrivers/iio/accel/MakefileÂÂÂÂÂÂÂÂÂÂÂÂ|ÂÂÂ1 +
> > Âdrivers/iio/accel/adis16209.cÂÂÂÂÂÂÂÂÂ| 329
> > ++++++++++++++++++++++++++++++++++
> > Âdrivers/staging/iio/accel/KconfigÂÂÂÂÂ|ÂÂ12 --
> > Âdrivers/staging/iio/accel/MakefileÂÂÂÂ|ÂÂÂ1 -
> > Âdrivers/staging/iio/accel/adis16209.c | 329 ----------------------
> > ------------
> > Â6 files changed, 342 insertions(+), 342 deletions(-)
> > Âcreate mode 100644 drivers/iio/accel/adis16209.c
> > Âdelete mode 100644 drivers/staging/iio/accel/adis16209.c
> >
> > diff --git a/drivers/iio/accel/Kconfig b/drivers/iio/accel/Kconfig
> > index c6d9517..f95f43c 100644
> > --- a/drivers/iio/accel/Kconfig
> > +++ b/drivers/iio/accel/Kconfig
> > @@ -5,6 +5,18 @@
> > Â
> > Âmenu "Accelerometers"
> > Â
> > +config ADIS16209
> > +ÂÂÂÂÂÂÂÂtristate "Analog Devices ADIS16209 Dual-Axis Digital
> > Inclinometer and Accelerometer"
> > +ÂÂÂÂÂÂÂÂdepends on SPI
> > +ÂÂÂÂÂÂÂÂselect IIO_ADIS_LIB
> > +ÂÂÂÂÂÂÂÂselect IIO_ADIS_LIB_BUFFER if IIO_BUFFER
> > +ÂÂÂÂÂÂÂÂhelp
> > +ÂÂÂÂÂÂÂÂÂÂSay Y here to build support for Analog Devices adis16209
> > dual-axis digital inclinometer
> > +ÂÂÂÂÂÂÂÂÂÂand accelerometer.
> > +
> > +ÂÂÂÂÂÂÂÂÂÂTo compile this driver as a module, say M here: the
> > module will be
> > +ÂÂÂÂÂÂÂÂÂÂcalled adis16209.
> > +
> > Âconfig ADXL345
> > Â tristate
> > Â
> > diff --git a/drivers/iio/accel/Makefile
> > b/drivers/iio/accel/Makefile
> > index 368aedb..40861b9 100644
> > --- a/drivers/iio/accel/Makefile
> > +++ b/drivers/iio/accel/Makefile
> > @@ -4,6 +4,7 @@
> > Â#
> > Â
> > Â# When adding new entries keep the list in alphabetical order
> > +obj-$(CONFIG_ADIS16209) += adis16209.o
> > Âobj-$(CONFIG_ADXL345) += adxl345_core.o
> > Âobj-$(CONFIG_ADXL345_I2C) += adxl345_i2c.o
> > Âobj-$(CONFIG_ADXL345_SPI) += adxl345_spi.o
> > diff --git a/drivers/iio/accel/adis16209.c
> > b/drivers/iio/accel/adis16209.c
> > new file mode 100644
> > index 0000000..ed2e89f
> > --- /dev/null
> > +++ b/drivers/iio/accel/adis16209.c
> > @@ -0,0 +1,329 @@
> > +/*
> > + * ADIS16209 Dual-Axis Digital Inclinometer and Accelerometer
> > + *
> > + * Copyright 2010 Analog Devices Inc.
> > + *
> > + * Licensed under the GPL-2 or later.
> > + */
> > +
> > +#include <linux/delay.h>
> > +#include <linux/device.h>
> > +#include <linux/kernel.h>
> > +#include <linux/list.h>
> > +#include <linux/module.h>
> > +#include <linux/spi/spi.h>
> > +#include <linux/slab.h>
> > +#include <linux/sysfs.h>
> > +
> > +#include <linux/iio/iio.h>
> > +#include <linux/iio/sysfs.h>
> > +#include <linux/iio/buffer.h>
> > +#include <linux/iio/imu/adis.h>
> > +
> > +#define ADIS16209_STARTUP_DELAY_MS 220
> > +#define ADIS16209_FLASH_CNT_REG 0x00
> > +
> > +/* Data Output Register Definitions */
> > +#define ADIS16209_SUPPLY_OUT_REG 0x02
> > +#define ADIS16209_XACCL_OUT_REG 0x04
> > +#define ADIS16209_YACCL_OUT_REG 0x06
> > +/* Output, auxiliary ADC input */
> > +#define ADIS16209_AUX_ADC_REG 0x08
> > +/* Output, temperature */
> > +#define ADIS16209_TEMP_OUT_REG 0x0A
> > +/* Output, +/- 90 degrees X-axis inclination */
> > +#define ADIS16209_XINCL_OUT_REG 0x0C
> > +#define ADIS16209_YINCL_OUT_REG 0x0E
> > +/* Output, +/-180 vertical rotational position */
> > +#define ADIS16209_ROT_OUT_REG 0x10
> > +
> > +/*
> > + * Calibration Register Definitions.
> > + * Acceleration, inclination or rotation offset null.
> > + */
> > +#define ADIS16209_XACCL_NULL_REG 0x12
> > +#define ADIS16209_YACCL_NULL_REG 0x14
> > +#define ADIS16209_XINCL_NULL_REG 0x16
> > +#define ADIS16209_YINCL_NULL_REG 0x18
> > +#define ADIS16209_ROT_NULL_REG 0x1A
> > +
> > +/* Alarm Register Definitions */
> > +#define ADIS16209_ALM_MAG1_REG 0x20
> > +#define ADIS16209_ALM_MAG2_REG 0x22
> > +#define ADIS16209_ALM_SMPL1_REG 0x24
> > +#define ADIS16209_ALM_SMPL2_REG 0x26
> > +#define ADIS16209_ALM_CTRL_REG 0x28
> > +
> > +#define ADIS16209_AUX_DAC_REG 0x30
> > +#define ADIS16209_GPIO_CTRL_REG 0x32
> > +#define ADIS16209_SMPL_PRD_REG 0x36
> > +#define ADIS16209_AVG_CNT_REG 0x38
> > +#define ADIS16209_SLP_CNT_REG 0x3A
> > +
> > +#define ADIS16209_MSC_CTRL_REG 0x34
> > +#defineÂÂADIS16209_MSC_CTRL_PWRUP_SELF_TEST BIT(10)
> > +#defineÂÂADIS16209_MSC_CTRL_SELF_TEST_EN BIT(8)
> > +#defineÂÂADIS16209_MSC_CTRL_DATA_RDY_EN BIT(2)
> > +/* Data-ready polarity: 1 = active high, 0 = active low */
> > +#defineÂÂADIS16209_MSC_CTRL_ACTIVE_HIGH BIT(1)
> > +#defineÂÂADIS16209_MSC_CTRL_DATA_RDY_DIO2 BIT(0)
> > +
> > +#define ADIS16209_STAT_REG 0x3C
> > +#defineÂÂADIS16209_STAT_ALARM2 BIT(9)
> > +#defineÂÂADIS16209_STAT_ALARM1 BIT(8)
> > +#defineÂÂADIS16209_STAT_SELFTEST_FAIL_BIT 5
> > +#defineÂÂADIS16209_STAT_SPI_FAIL_BIT 3
> > +#defineÂÂADIS16209_STAT_FLASH_UPT_FAIL_BIT 2
> > +/* Power supply above 3.625 V */
> > +#defineÂÂADIS16209_STAT_POWER_HIGH_BIT 1
> > +/* Power supply below 3.15 V */
> > +#defineÂÂADIS16209_STAT_POWER_LOW_BIT 0
> > +
> > +#define ADIS16209_CMD_REG 0x3E
> > +#defineÂÂADIS16209_CMD_SW_RESET BIT(7)
> > +#defineÂÂADIS16209_CMD_CLEAR_STAT BIT(4)
> > +#defineÂÂADIS16209_CMD_FACTORY_CAL BIT(1)
> > +
> > +#define ADIS16209_ERROR_ACTIVE BIT(14)
> > +
> > +enum adis16209_scan {
> > + ADIS16209_SCAN_SUPPLY,
> > + ADIS16209_SCAN_ACC_X,
> > + ADIS16209_SCAN_ACC_Y,
> > + ADIS16209_SCAN_AUX_ADC,
> > + ADIS16209_SCAN_TEMP,
> > + ADIS16209_SCAN_INCLI_X,
> > + ADIS16209_SCAN_INCLI_Y,
> > + ADIS16209_SCAN_ROT,
> > +};
> > +
> > +static const u8 adis16209_addresses[8][1] = {
> > + [ADIS16209_SCAN_SUPPLY] = { },
> > + [ADIS16209_SCAN_AUX_ADC] = { },
> > + [ADIS16209_SCAN_ACC_X] = { ADIS16209_XACCL_NULL_REG },
> > + [ADIS16209_SCAN_ACC_Y] = { ADIS16209_YACCL_NULL_REG },
> > + [ADIS16209_SCAN_INCLI_X] = { ADIS16209_XINCL_NULL_REG },
> > + [ADIS16209_SCAN_INCLI_Y] = { ADIS16209_YINCL_NULL_REG },
> > + [ADIS16209_SCAN_ROT] = { },
> > + [ADIS16209_SCAN_TEMP] = { },
> > +};
> > +
> > +static int adis16209_write_raw(struct iio_dev *indio_dev,
> > + ÂÂÂÂÂÂÂstruct iio_chan_spec const *chan,
> > + ÂÂÂÂÂÂÂint val,
> > + ÂÂÂÂÂÂÂint val2,
> > + ÂÂÂÂÂÂÂlong mask)
> > +{
> > + struct adis *st = iio_priv(indio_dev);
> > + int bits;
> > + s16 val16;
> > + u8 addr;
> > +
> > + switch (mask) {
> > + case IIO_CHAN_INFO_CALIBBIAS:
> > + switch (chan->type) {
> > + case IIO_ACCEL:
> > + case IIO_INCLI:
> > + bits = 14;
> > + break;
> > + default:
> > + return -EINVAL;
> > + }
> > + val16 = val & ((1 << bits) - 1);
> > + addr = adis16209_addresses[chan->scan_index][0];
> > + return adis_write_reg_16(st, addr, val16);
> > + }
> > + return -EINVAL;
> > +}
> > +
> > +static int adis16209_read_raw(struct iio_dev *indio_dev,
> > + ÂÂÂÂÂÂstruct iio_chan_spec const *chan,
> > + ÂÂÂÂÂÂint *val, int *val2,
> > + ÂÂÂÂÂÂlong mask)
> > +{
> > + struct adis *st = iio_priv(indio_dev);
> > + int ret;
> > + int bits;
> > + u8 addr;
> > + s16 val16;
> > +
> > + switch (mask) {
> > + case IIO_CHAN_INFO_RAW:
> > + return adis_single_conversion(indio_dev, chan,
> > + ADIS16209_ERROR_ACTIVE, val);
> > + case IIO_CHAN_INFO_SCALE:
> > + switch (chan->type) {
> > + case IIO_VOLTAGE:
> > + *val = 0;
> > + if (chan->channel == 0)
> > + *val2 = 305180; /* 0.30518 mV */
> > + else
> > + *val2 = 610500; /* 0.6105 mV */
> > + return IIO_VAL_INT_PLUS_MICRO;
> > + case IIO_TEMP:
> > + *val = -470;
> > + *val2 = 0;
> > + return IIO_VAL_INT_PLUS_MICRO;
> > + case IIO_ACCEL:
> > + /*
> > + Â* IIO base unit for sensitivity of
> > accelerometer
> > + Â* is milli g.
> > + Â* 1 LSB represents 0.244 mg.
> > + Â*/
> > + *val = 0;
> > + *val2 = IIO_G_TO_M_S_2(244140);
> > + return IIO_VAL_INT_PLUS_NANO;
> > + case IIO_INCLI:
> > + case IIO_ROT:
> > + /*
> > + Â* IIO base units for rotation are
> > degrees.
> > + Â* 1 LSB represents 0.025 milli degrees.
> > + Â*/
> > + *val = 0;
> > + *val2 = 25000;
> > + return IIO_VAL_INT_PLUS_MICRO;
> > + default:
> > + return -EINVAL;
> > + }
> > + break;
> > + case IIO_CHAN_INFO_OFFSET:
> > + /*
> > + Â* The raw ADC value is 0x4FE when the temperature
> > + Â* is 45 degrees and the scale factor per milli
> > + Â* degree celcius is -470.
> > + Â*/
> > + *val = 25000 / -470 - 0x4FE;
> > + return IIO_VAL_INT;
> > + case IIO_CHAN_INFO_CALIBBIAS:
> > + switch (chan->type) {
> > + case IIO_ACCEL:
> > + bits = 14;
> > + break;
> > + default:
> > + return -EINVAL;
> > + }
> > + addr = adis16209_addresses[chan->scan_index][0];
> > + ret = adis_read_reg_16(st, addr, &val16);
> > + if (ret)
> > + return ret;
> > + val16 &= (1 << bits) - 1;
> > + val16 = (s16)(val16 << (16 - bits)) >> (16 -
> > bits);
> > + *val = val16;
> Something odd here as this isn't the current code - doesn't have the
> sign extend patch in place.
>
> >
> > + return IIO_VAL_INT;
> > + }
> > + return -EINVAL;
> > +}
> > +
> > +static const struct iio_chan_spec adis16209_channels[] = {
> > + ADIS_SUPPLY_CHAN(ADIS16209_SUPPLY_OUT_REG,
> > ADIS16209_SCAN_SUPPLY,
> > + Â0, 14),
> > + ADIS_TEMP_CHAN(ADIS16209_TEMP_OUT_REG,
> > ADIS16209_SCAN_TEMP, 0, 12),
> > + ADIS_ACCEL_CHAN(X, ADIS16209_XACCL_OUT_REG,
> > ADIS16209_SCAN_ACC_X,
> > + BIT(IIO_CHAN_INFO_CALIBBIAS), 0, 14),
> > + ADIS_ACCEL_CHAN(Y, ADIS16209_YACCL_OUT_REG,
> > ADIS16209_SCAN_ACC_Y,
> > + BIT(IIO_CHAN_INFO_CALIBBIAS), 0, 14),
> > + ADIS_AUX_ADC_CHAN(ADIS16209_AUX_ADC_REG,
> > ADIS16209_SCAN_AUX_ADC, 0, 12),
> > + ADIS_INCLI_CHAN(X, ADIS16209_XINCL_OUT_REG,
> > ADIS16209_SCAN_INCLI_X,
> > + 0, 0, 14),
> > + ADIS_INCLI_CHAN(Y, ADIS16209_YINCL_OUT_REG,
> > ADIS16209_SCAN_INCLI_Y,
> > + 0, 0, 14),
> > + ADIS_ROT_CHAN(X, ADIS16209_ROT_OUT_REG,
> > ADIS16209_SCAN_ROT, 0, 0, 14),
> This raises an interesting question.ÂÂHow do we define rotation axes?
> I would assume it was rotation about the axis, as such I think the
> correct
> axis for this is Z.
>
> However, then we consider the two inclination axis. Again fiddly.ÂÂI
> suppose
> it is inclination 'from' an axis, but in what plane?ÂÂI guess x and y
> is about as good as we can do on those ones with the assumption they
> are aligned to perpendicular to the vertical.
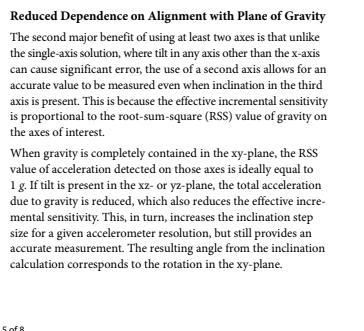
I went through some datasheets to find out more about the single axis
tilt inclination and double axis tilt inclination.
Rotational angle is provided by double axis tilt theory.
As the name tells us that it is dual axis i.e. we are considering X and
Y axis here so maybe this is why we are not taking Z axis here.
Angle of rotation is taken from the X axis.
I am attaching some screenshots about more information on this.
Maybe they can be helpful.
Also If I have understood something wrong then please do correct
me :)
Thanks
>
> >
> > + IIO_CHAN_SOFT_TIMESTAMP(8)
> > +};
> > +
> > +static const struct iio_info adis16209_info = {
> > + .read_raw = adis16209_read_raw,
> > + .write_raw = adis16209_write_raw,
> > + .update_scan_mode = adis_update_scan_mode,
> > +};
> > +
> > +static const char * const adis16209_status_error_msgs[] = {
> > + [ADIS16209_STAT_SELFTEST_FAIL_BIT] = "Self test failure",
> > + [ADIS16209_STAT_SPI_FAIL_BIT] = "SPI failure",
> > + [ADIS16209_STAT_FLASH_UPT_FAIL_BIT] = "Flash update
> > failed",
> > + [ADIS16209_STAT_POWER_HIGH_BIT] = "Power supply above
> > 3.625V",
> > + [ADIS16209_STAT_POWER_LOW_BIT] = "Power supply below
> > 3.15V",
> > +};
> > +
> > +static const struct adis_data adis16209_data = {
> > + .read_delay = 30,
> > + .msc_ctrl_reg = ADIS16209_MSC_CTRL_REG,
> > + .glob_cmd_reg = ADIS16209_CMD_REG,
> > + .diag_stat_reg = ADIS16209_STAT_REG,
> > +
> > + .self_test_mask = ADIS16209_MSC_CTRL_SELF_TEST_EN,
> > + .self_test_no_autoclear = true,
> > + .startup_delay = ADIS16209_STARTUP_DELAY_MS,
> > +
> > + .status_error_msgs = adis16209_status_error_msgs,
> > + .status_error_mask = BIT(ADIS16209_STAT_SELFTEST_FAIL_BIT)
> > |
> > + BIT(ADIS16209_STAT_SPI_FAIL_BIT) |
> > + BIT(ADIS16209_STAT_FLASH_UPT_FAIL_BIT) |
> > + BIT(ADIS16209_STAT_POWER_HIGH_BIT) |
> > + BIT(ADIS16209_STAT_POWER_LOW_BIT),
> > +};
> > +
> > +static int adis16209_probe(struct spi_device *spi)
> > +{
> > + int ret;
> > + struct adis *st;
> > + struct iio_dev *indio_dev;
> It's not one I personally feel strongly about but when there is no
> reason not to do it, reverse Christmas tree ordering is preferred for
> variable declarations.
>
> >
> > +
> > + indio_dev = devm_iio_device_alloc(&spi->dev, sizeof(*st));
> > + if (!indio_dev)
> > + return -ENOMEM;
> Blank line here.
>
> >
> > + st = iio_priv(indio_dev);
> > + spi_set_drvdata(spi, indio_dev);
> > +
> > + indio_dev->name = spi->dev.driver->name;
> > + indio_dev->dev.parent = &spi->dev;
> > + indio_dev->info = &adis16209_info;
> > + indio_dev->channels = adis16209_channels;
> > + indio_dev->num_channels = ARRAY_SIZE(adis16209_channels);
> > + indio_dev->modes = INDIO_DIRECT_MODE;
> > +
> > + ret = adis_init(st, indio_dev, spi, &adis16209_data);
> > + if (ret)
> > + return ret;
> Blank line here.
>
> >
> > + ret = adis_setup_buffer_and_trigger(st, indio_dev, NULL);
> > + if (ret)
> > + return ret;
> > +
> > + ret = adis_initial_startup(st);
> > + if (ret)
> > + goto error_cleanup_buffer_trigger;
> > + ret = iio_device_register(indio_dev);
> > + if (ret)
> > + goto error_cleanup_buffer_trigger;
> > +
> > + return 0;
> > +
> > +error_cleanup_buffer_trigger:
> > + adis_cleanup_buffer_and_trigger(st, indio_dev);
> > + return ret;
> > +}
> > +
> > +static int adis16209_remove(struct spi_device *spi)
> > +{
> > + struct iio_dev *indio_dev = spi_get_drvdata(spi);
> > + struct adis *st = iio_priv(indio_dev);
> > +
> > + iio_device_unregister(indio_dev);
> > + adis_cleanup_buffer_and_trigger(st, indio_dev);
> > +
> > + return 0;
> > +}
> > +
> > +static struct spi_driver adis16209_driver = {
> > + .driver = {
> > + .name = "adis16209",
> > + },
> > + .probe = adis16209_probe,
> > + .remove = adis16209_remove,
> > +};
> > +module_spi_driver(adis16209_driver);
> > +
> > +MODULE_AUTHOR("Barry Song <21cnbao@xxxxxxxxx>");
> > +MODULE_DESCRIPTION("Analog Devices ADIS16209 Dual-Axis Digital
> > Inclinometer and Accelerometer");
> > +MODULE_LICENSE("GPL v2");
> > +MODULE_ALIAS("spi:adis16209");]
> <snip>Attachment:
Screen Shot 2018-03-16 at 12.23.03 am.png
Description: PNG image
Attachment:
Screen Shot 2018-03-16 at 12.23.34 am.png
Description: PNG image
{kind=link}
{kind=link}